
در مقایسه با موتورهای شار شعاعی، موتورهای شار محوری مزایای زیادی در طراحی خودروهای الکتریکی دارند. به عنوان مثال، موتورهای شار محوری میتوانند با جابجایی موتور از محور به داخل چرخها، طراحی سیستم انتقال قدرت را تغییر دهند.
۱. محور قدرت
موتورهای شار محوریتوجه فزایندهای را به خود جلب میکنند (افزایش کشش). سالهاست که این نوع موتور در کاربردهای ثابت مانند آسانسورها و ماشینآلات کشاورزی مورد استفاده قرار میگیرد، اما در طول دهه گذشته، بسیاری از توسعهدهندگان در تلاش بودهاند تا این فناوری را بهبود بخشیده و آن را در موتورسیکلتهای برقی، پادهای فرودگاهی، کامیونهای باری، وسایل نقلیه برقی و حتی هواپیماها به کار گیرند.
موتورهای شار شعاعی سنتی از آهنرباهای دائمی یا موتورهای القایی استفاده میکنند که پیشرفت قابل توجهی در بهینهسازی وزن و هزینه داشتهاند. با این حال، آنها در ادامه توسعه با مشکلات زیادی روبرو هستند. شار محوری، یک نوع موتور کاملاً متفاوت، ممکن است جایگزین خوبی باشد.
در مقایسه با موتورهای شعاعی، سطح مغناطیسی مؤثر موتورهای آهنربای دائم شار محوری، سطح روتور موتور است، نه قطر خارجی. بنابراین، در حجم مشخصی از موتور، موتورهای آهنربای دائم شار محوری معمولاً میتوانند گشتاور بیشتری ارائه دهند.
موتورهای شار محوریفشردهتر هستند؛ در مقایسه با موتورهای شعاعی، طول محوری موتور بسیار کوتاهتر است. برای موتورهای چرخ داخلی، این اغلب یک عامل حیاتی است. ساختار فشرده موتورهای محوری، چگالی توان و چگالی گشتاور بالاتری را نسبت به موتورهای شعاعی مشابه تضمین میکند، بنابراین نیاز به سرعتهای عملیاتی بسیار بالا را از بین میبرد.
راندمان موتورهای شار محوری نیز بسیار بالا است، معمولاً بیش از ۹۶٪. این به لطف مسیر شار کوتاهتر و یک بعدی است که در مقایسه با بهترین موتورهای شار شعاعی دوبعدی موجود در بازار، از نظر راندمان قابل مقایسه یا حتی بالاتر است.
طول موتور کوتاهتر است، معمولاً ۵ تا ۸ برابر کوتاهتر، و وزن نیز ۲ تا ۵ برابر کاهش مییابد. این دو عامل انتخاب طراحان پلتفرم خودروهای برقی را تغییر داده است.
۲. فناوری شار محوری
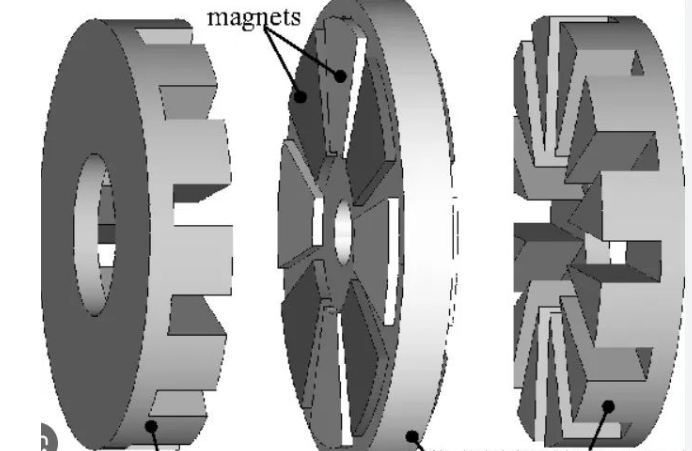
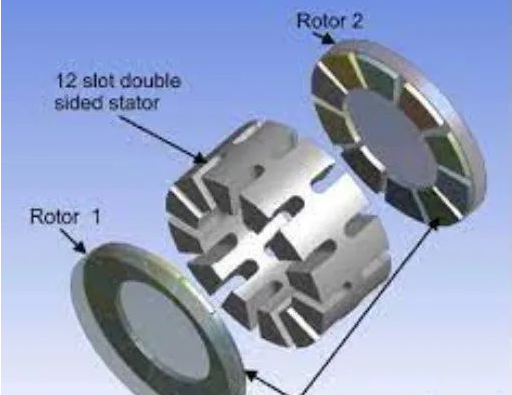
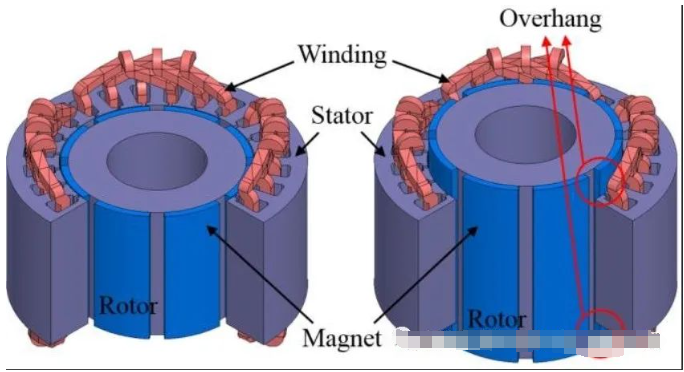
دو توپولوژی اصلی برایموتورهای شار محوری: دو روتور، تک استاتور (که گاهی اوقات به عنوان ماشینهای سبک چنبره ای شناخته میشوند) و تک روتور، دو استاتور.
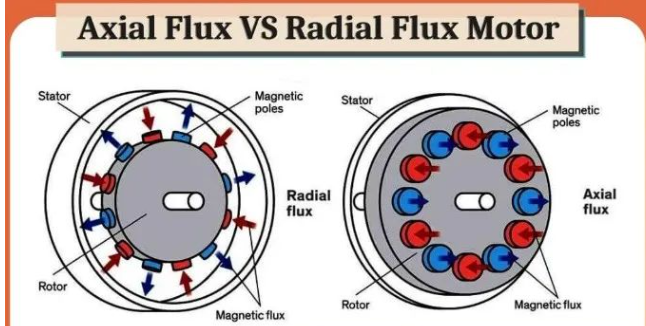
در حال حاضر، اکثر موتورهای آهنربای دائم از توپولوژی شار شعاعی استفاده میکنند. مدار شار مغناطیسی با یک آهنربای دائم روی روتور شروع میشود، از اولین دندانه روی استاتور عبور میکند و سپس به صورت شعاعی در امتداد استاتور جریان مییابد. سپس از دندانه دوم عبور میکند تا به فولاد مغناطیسی دوم روی روتور برسد. در توپولوژی شار محوری روتور دوگانه، حلقه شار از آهنربای اول شروع میشود، به صورت محوری از دندانههای استاتور عبور میکند و بلافاصله به آهنربای دوم میرسد.
این بدان معناست که مسیر شار بسیار کوتاهتر از موتورهای شار شعاعی است، که منجر به حجم موتور کوچکتر، چگالی توان بالاتر و راندمان در توان یکسان میشود.
یک موتور شعاعی، که در آن شار مغناطیسی از اولین دندانه عبور میکند و سپس از طریق استاتور به دندانه بعدی برمیگردد و به آهنربا میرسد. شار مغناطیسی یک مسیر دو بعدی را دنبال میکند.
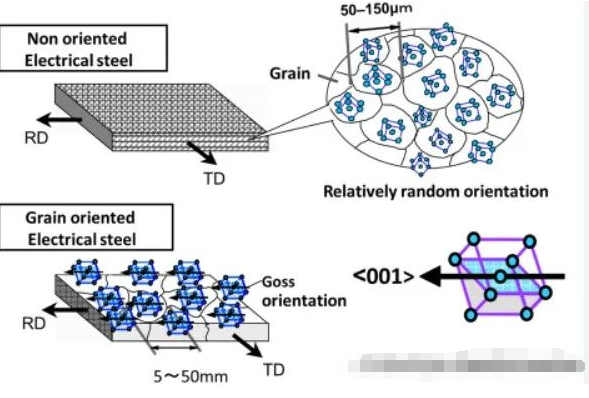
مسیر شار مغناطیسی یک ماشین شار مغناطیسی محوری یک بعدی است، بنابراین میتوان از فولاد الکتریکی با جهتگیری دانهای استفاده کرد. این فولاد عبور شار را آسانتر میکند و در نتیجه راندمان را بهبود میبخشد.
موتورهای شار شعاعی به طور سنتی از سیمپیچهای توزیعشده استفاده میکنند که تا نیمی از انتهای سیمپیچها کار نمیکنند. بیرونزدگی سیمپیچ منجر به وزن، هزینه، مقاومت الکتریکی و تلفات حرارتی بیشتر میشود و طراحان را مجبور به بهبود طراحی سیمپیچ میکند.
انتهای کویلموتورهای شار محوریبسیار کمتر هستند و برخی از طرحها از سیمپیچهای متمرکز یا قطعهای استفاده میکنند که کاملاً مؤثر هستند. برای ماشینهای شعاعی با استاتور قطعهای، پارگی مسیر شار مغناطیسی در استاتور میتواند تلفات اضافی به همراه داشته باشد، اما برای موتورهای شار محوری، این مشکل نیست. طراحی سیمپیچ کویل، کلید تشخیص سطح تأمینکنندگان است.
۳. توسعه
موتورهای شار محوری با چالشهای جدی در طراحی و تولید مواجه هستند، علیرغم مزایای تکنولوژیکی، هزینههای آنها بسیار بالاتر از موتورهای شعاعی است. مردم درک بسیار کاملی از موتورهای شعاعی دارند و روشهای تولید و تجهیزات مکانیکی نیز به راحتی در دسترس هستند.
یکی از چالشهای اصلی موتورهای شار محوری، حفظ شکاف هوایی یکنواخت بین روتور و استاتور است، زیرا نیروی مغناطیسی بسیار بیشتر از موتورهای شعاعی است و حفظ شکاف هوایی یکنواخت را دشوار میکند. موتور شار محوری دو روتوره همچنین دارای مشکلات اتلاف گرما است، زیرا سیمپیچ در اعماق استاتور و بین دو دیسک روتور قرار دارد و اتلاف گرما را بسیار دشوار میکند.
ساخت موتورهای شار محوری نیز به دلایل زیادی دشوار است. ماشین دو روتوره با استفاده از یک ماشین دو روتوره با توپولوژی یوغ (یعنی حذف یوغ آهنی از استاتور اما حفظ دندانههای آهنی) بر برخی از این مشکلات بدون افزایش قطر موتور و آهنربا غلبه میکند.
با این حال، برداشتن یوک چالشهای جدیدی را به همراه دارد، مانند چگونگی ثابت کردن و قرار دادن تک تک دندانها بدون اتصال مکانیکی یوک. خنک کردن نیز چالش بزرگتری است.
همچنین تولید روتور و حفظ فاصله هوایی دشوار است، زیرا دیسک روتور، روتور را جذب میکند. مزیت این است که دیسکهای روتور مستقیماً از طریق یک حلقه شفت به هم متصل هستند، بنابراین نیروها یکدیگر را خنثی میکنند. این بدان معناست که یاتاقان داخلی در برابر این نیروها مقاومت نمیکند و تنها وظیفه آن نگه داشتن استاتور در موقعیت میانی بین دو دیسک روتور است.
موتورهای تک روتور دو استاتوره با چالشهای موتورهای دایرهای مواجه نیستند، اما طراحی استاتور بسیار پیچیدهتر و دستیابی به اتوماسیون آن دشوارتر است و هزینههای مرتبط نیز بالا است. برخلاف هر موتور شار شعاعی سنتی، فرآیندهای تولید موتور محوری و تجهیزات مکانیکی آن اخیراً پدیدار شدهاند.
۴. کاربرد وسایل نقلیه الکتریکی
قابلیت اطمینان در صنعت خودرو بسیار مهم است و اثبات قابلیت اطمینان و استحکام قطعات مختلف ...موتورهای شار محوریمتقاعد کردن تولیدکنندگان مبنی بر اینکه این موتورها برای تولید انبوه مناسب هستند، همواره یک چالش بوده است. این امر تأمینکنندگان موتورهای محوری را بر آن داشته است که برنامههای اعتبارسنجی گستردهای را به تنهایی انجام دهند و هر تأمینکننده نشان دهد که قابلیت اطمینان موتور آنها هیچ تفاوتی با موتورهای شار شعاعی سنتی ندارد.
تنها قطعهای که میتواند در ... فرسوده شودموتور شار محورییاتاقانها هستند. طول شار مغناطیسی محوری نسبتاً کوتاه است و موقعیت یاتاقانها نزدیکتر است، که معمولاً طوری طراحی میشود که کمی "بیش از حد بزرگنمایی شده" باشد. خوشبختانه، موتور شار محوری جرم روتور کمتری دارد و میتواند بارهای دینامیکی شفت روتور کمتری را تحمل کند. بنابراین، نیروی واقعی اعمال شده به یاتاقانها بسیار کمتر از موتور شار شعاعی است.

محور الکترونیکی یکی از اولین کاربردهای موتورهای محوری است. عرض نازکتر میتواند موتور و گیربکس را در محور جای دهد. در کاربردهای هیبریدی، طول محوری کوتاهتر موتور به نوبه خود طول کل سیستم انتقال قدرت را کوتاه میکند.
مرحله بعدی نصب موتور محوری روی چرخ است. به این ترتیب، میتوان نیرو را مستقیماً از موتور به چرخها منتقل کرد و راندمان موتور را بهبود بخشید. به دلیل حذف گیربکس، دیفرانسیل و میل گاردان، پیچیدگی سیستم نیز کاهش یافته است.
با این حال، به نظر میرسد که هنوز پیکربندیهای استانداردی ظاهر نشدهاند. هر تولیدکننده تجهیزات اصلی در حال تحقیق در مورد پیکربندیهای خاص خود است، زیرا اندازهها و شکلهای مختلف موتورهای محوری میتواند طراحی وسایل نقلیه الکتریکی را تغییر دهد. در مقایسه با موتورهای شعاعی، موتورهای محوری چگالی توان بالاتری دارند، به این معنی که میتوان از موتورهای محوری کوچکتر استفاده کرد. این امر گزینههای طراحی جدیدی را برای پلتفرمهای خودرو، مانند قرارگیری بستههای باتری، فراهم میکند.
۴.۱ آرماتور قطعهای
توپولوژی موتور YASA (بدون یوکل و آرمیچر قطعهای) نمونهای از توپولوژی تک استاتور دو روتوره است که پیچیدگی تولید را کاهش میدهد و برای تولید انبوه خودکار مناسب است. این موتورها دارای چگالی توان تا 10 کیلووات بر کیلوگرم در سرعتهای 2000 تا 9000 دور در دقیقه هستند.

با استفاده از یک کنترلر اختصاصی، میتواند جریانی معادل ۲۰۰ کیلوولتآمپر برای موتور فراهم کند. این کنترلر تقریباً ۵ لیتر حجم و ۵.۸ کیلوگرم وزن دارد، شامل مدیریت حرارتی با خنککننده روغن دیالکتریک، مناسب برای موتورهای شار محوری و همچنین موتورهای شار القایی و شعاعی.
این امر به تولیدکنندگان تجهیزات اصلی خودروهای الکتریکی و توسعهدهندگان سطح اول اجازه میدهد تا موتور مناسب را بر اساس کاربرد و فضای موجود، به صورت انعطافپذیر انتخاب کنند. اندازه و وزن کمتر، خودرو را سبکتر کرده و باتریهای بیشتری را در اختیار قرار میدهد و در نتیجه برد مسافتی را افزایش میدهد.
۵. کاربرد موتورسیکلتهای برقی
برای موتورسیکلتهای برقی و ATVها، برخی شرکتها موتورهای شار محوری AC را توسعه دادهاند. طراحی رایج برای این نوع وسیله نقلیه، طرحهای شار محوری مبتنی بر جاروبک DC است، در حالی که محصول جدید، یک طراحی بدون جاروبک AC کاملاً آببندی شده است.
سیمپیچهای هر دو موتور DC و AC ثابت میمانند، اما روتورهای دوگانه به جای آرمیچرهای چرخان از آهنرباهای دائمی استفاده میکنند. مزیت این روش این است که نیازی به معکوس کردن مکانیکی ندارد.
طراحی محوری AC همچنین میتواند از کنترلکنندههای استاندارد موتور AC سه فاز برای موتورهای شعاعی استفاده کند. این امر به کاهش هزینهها کمک میکند، زیرا کنترلکننده جریان گشتاور را کنترل میکند، نه سرعت را. این کنترلکننده به فرکانس ۱۲ کیلوهرتز یا بالاتر نیاز دارد که فرکانس اصلی چنین دستگاههایی است.
فرکانس بالاتر از اندوکتانس سیمپیچ پایینتر ۲۰ میکروH ناشی میشود. این فرکانس میتواند جریان را کنترل کند تا ریپل جریان را به حداقل برساند و سیگنال سینوسی را تا حد امکان هموار تضمین کند. از دیدگاه دینامیکی، این یک روش عالی برای دستیابی به کنترل روانتر موتور با امکان تغییرات سریع گشتاور است.
این طرح از یک سیمپیچ دولایه توزیعشده استفاده میکند، بنابراین شار مغناطیسی از روتور به روتور دیگر از طریق استاتور، با مسیری بسیار کوتاه و راندمان بالاتر، جریان مییابد.
نکته کلیدی این طراحی این است که میتواند با حداکثر ولتاژ ۶۰ ولت کار کند و برای سیستمهای ولتاژ بالاتر مناسب نیست. بنابراین، میتوان از آن برای موتورسیکلتهای برقی و وسایل نقلیه چهار چرخ کلاس L7e مانند رنو Twizy استفاده کرد.
حداکثر ولتاژ ۶۰ ولت به موتور اجازه میدهد تا در سیستمهای الکتریکی ۴۸ ولت جریان اصلی ادغام شود و کار تعمیر و نگهداری را ساده کند.
مشخصات موتورسیکلت چهار چرخ L7e در آییننامه چارچوب اروپایی 2002/24/EC تصریح میکند که وزن وسایل نقلیه مورد استفاده برای حمل کالا، به استثنای وزن باتریها، نباید از 600 کیلوگرم تجاوز کند. این وسایل نقلیه مجاز به حمل حداکثر 200 کیلوگرم مسافر، حداکثر 1000 کیلوگرم بار و حداکثر 15 کیلووات قدرت موتور هستند. روش سیمپیچ توزیعشده میتواند گشتاوری بین 75 تا 100 نیوتنمتر، با حداکثر توان خروجی 20 تا 25 کیلووات و توان مداوم 15 کیلووات فراهم کند.
چالش شار محوری در چگونگی دفع گرما توسط سیمپیچهای مسی نهفته است، که دشوار است زیرا گرما باید از روتور عبور کند. سیمپیچ توزیعشده کلید حل این مشکل است، زیرا تعداد زیادی شیار قطب دارد. به این ترتیب، سطح تماس بیشتری بین مس و پوسته وجود دارد و گرما میتواند به خارج منتقل شود و توسط یک سیستم خنککننده مایع استاندارد تخلیه شود.
قطبهای مغناطیسی چندگانه کلید استفاده از شکل موجهای سینوسی هستند که به کاهش هارمونیکها کمک میکنند. این هارمونیکها به صورت گرم شدن آهنرباها و هسته ظاهر میشوند، در حالی که اجزای مسی نمیتوانند گرما را از بین ببرند. هنگامی که گرما در آهنرباها و هستههای آهنی جمع میشود، راندمان کاهش مییابد، به همین دلیل بهینهسازی شکل موج و مسیر گرما برای عملکرد موتور بسیار مهم است.
طراحی موتور برای کاهش هزینهها و دستیابی به تولید انبوه خودکار بهینه شده است. حلقه محفظه اکسترود شده نیازی به پردازش مکانیکی پیچیده ندارد و میتواند هزینههای مواد را کاهش دهد. سیمپیچ را میتوان مستقیماً پیچید و در طول فرآیند پیچیدن، از فرآیند اتصال برای حفظ شکل صحیح مونتاژ استفاده میشود.
نکته کلیدی این است که سیمپیچ از سیم استاندارد موجود در بازار ساخته شده است، در حالی که هسته آهنی با فولاد ترانسفورماتور استاندارد که به سادگی باید برش داده شود تا به شکل دلخواه درآید، لایه لایه شده است. سایر طرحهای موتور نیاز به استفاده از مواد مغناطیسی نرم در لایه لایه کردن هسته دارند که ممکن است گرانتر باشد.
استفاده از سیمپیچهای توزیعشده به این معنی است که فولاد مغناطیسی نیازی به قطعهبندی ندارد؛ آنها میتوانند شکلهای سادهتری داشته باشند و تولیدشان آسانتر باشد. کاهش اندازه فولاد مغناطیسی و اطمینان از سهولت تولید آن، تأثیر قابلتوجهی بر کاهش هزینهها دارد.
طراحی این موتور شار محوری همچنین میتواند بر اساس نیاز مشتری سفارشیسازی شود. مشتریان نسخههای سفارشیسازیشدهای را بر اساس طراحی اولیه توسعه دادهاند. سپس برای تأیید اولیه تولید، در یک خط تولید آزمایشی تولید میشوند که میتواند در کارخانههای دیگر نیز تکرار شود.
سفارشیسازی عمدتاً به این دلیل است که عملکرد خودرو نه تنها به طراحی موتور شار مغناطیسی محوری، بلکه به کیفیت ساختار خودرو، بسته باتری و سیستم مدیریت باتری (BMS) نیز بستگی دارد.
زمان ارسال: ۲۸ سپتامبر ۲۰۲۳


