
در مقایسه با موتورهای شار شعاعی، موتورهای شار محوری مزایای زیادی در طراحی خودروهای الکتریکی دارند. به عنوان مثال، موتورهای شار محوری می توانند با حرکت دادن موتور از محور به داخل چرخ ها، طراحی سیستم انتقال قدرت را تغییر دهند.
1-محور قدرت
موتورهای شار محوریتوجه فزاینده ای دریافت می کنند (کشش به دست آوردن). سالهاست که از این نوع موتورها در کاربردهای ثابت مانند آسانسور و ماشینآلات کشاورزی استفاده میشود، اما در یک دهه گذشته، توسعهدهندگان زیادی تلاش کردهاند تا این فناوری را بهبود بخشند و آن را در موتورسیکلتهای برقی، غلاف فرودگاه، کامیونهای باری، برقی به کار ببرند. وسایل نقلیه و حتی هواپیما.
موتورهای شار شعاعی سنتی از آهنرباهای دائمی یا موتورهای القایی استفاده می کنند که پیشرفت قابل توجهی در بهینه سازی وزن و هزینه داشته اند. با این حال، آنها برای ادامه توسعه با مشکلات زیادی روبرو هستند. شار محوری، یک نوع موتور کاملاً متفاوت، ممکن است جایگزین خوبی باشد.
در مقایسه با موتورهای شعاعی، سطح مغناطیسی موثر موتورهای آهنربای دائم شار محوری، سطح روتور موتور است، نه قطر بیرونی. بنابراین، در حجم معینی از موتور، موتورهای آهنربای دائم شار محوری معمولاً می توانند گشتاور بیشتری ارائه دهند.
موتورهای شار محوریفشرده تر هستند؛ در مقایسه با موتورهای شعاعی، طول محوری موتور بسیار کوتاهتر است. برای موتورهای چرخ داخلی، این اغلب یک عامل بسیار مهم است. ساختار فشرده موتورهای محوری چگالی توان و چگالی گشتاور بالاتری را نسبت به موتورهای شعاعی مشابه تضمین میکند و در نتیجه نیاز به سرعتهای کاری بسیار بالا را از بین میبرد.
راندمان موتورهای شار محوری نیز بسیار بالا است و معمولاً بیش از 96٪ است. این به لطف مسیر شار کوتاهتر و یک بعدی است که در مقایسه با بهترین موتورهای شار شعاعی دو بعدی موجود در بازار، قابل مقایسه یا حتی بالاتر است.
طول موتور کوتاهتر است، معمولاً 5 تا 8 برابر کوتاهتر است و وزن آن نیز 2 تا 5 برابر کاهش می یابد. این دو عامل انتخاب طراحان پلت فرم خودروهای الکتریکی را تغییر داده است.
2. تکنولوژی شار محوری
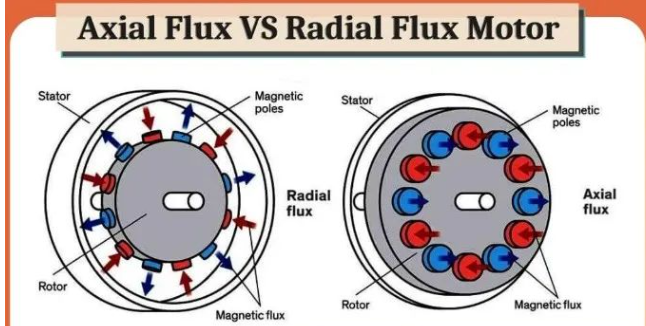
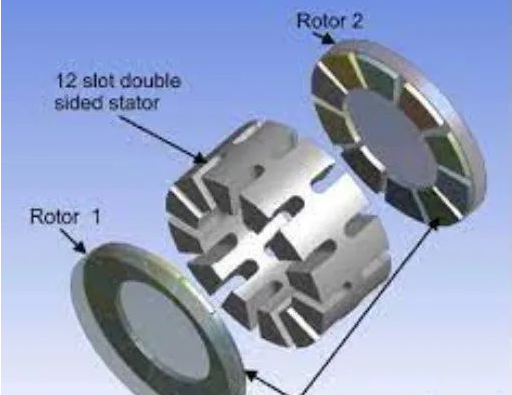
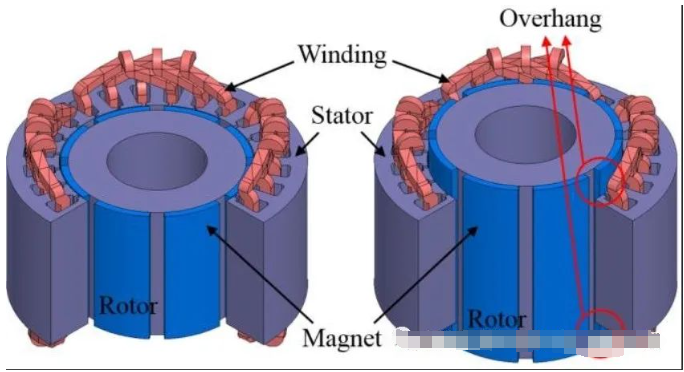
دو توپولوژی اصلی برای وجود داردموتورهای شار محوری: دو روتور تک استاتور (گاهی اوقات به عنوان ماشین های سبک توروس نامیده می شود) و تک روتور دو استاتور.
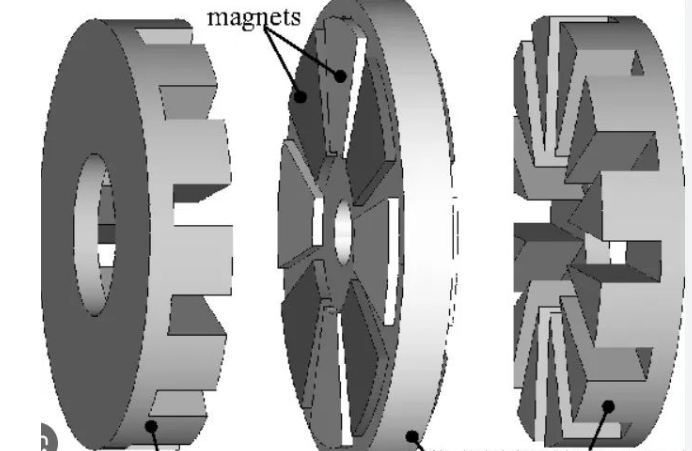
در حال حاضر، بیشتر موتورهای آهنربای دائمی از توپولوژی شار شعاعی استفاده می کنند. مدار شار مغناطیسی با یک آهنربای دائمی روی روتور شروع می شود، از اولین دندان روی استاتور عبور می کند و سپس به صورت شعاعی در امتداد استاتور جریان می یابد. سپس از دندان دوم عبور کنید تا به فولاد مغناطیسی دوم روی روتور برسید. در توپولوژی شار محوری روتور دوگانه، حلقه شار از آهنربای اول شروع می شود، به صورت محوری از دندانه های استاتور عبور می کند و بلافاصله به آهنربای دوم می رسد.
این بدان معناست که مسیر شار بسیار کوتاهتر از موتورهای شار شعاعی است و در نتیجه حجم موتورهای کوچکتر، چگالی توان بالاتر و راندمان در همان توان ایجاد می شود.
یک موتور شعاعی که در آن شار مغناطیسی از دندان اول عبور می کند و سپس از طریق استاتور به دندانه بعدی باز می گردد و به آهنربا می رسد. شار مغناطیسی یک مسیر دو بعدی را دنبال می کند.
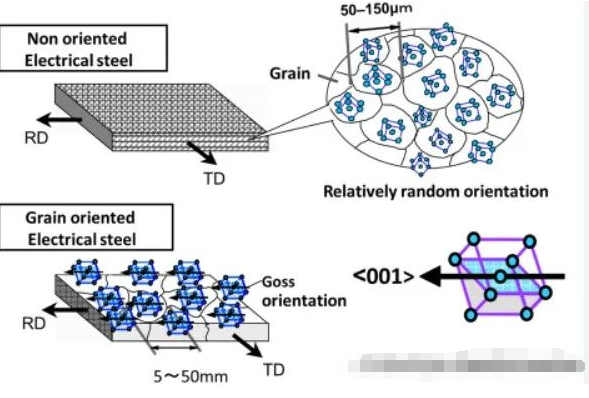
مسیر شار مغناطیسی یک ماشین شار مغناطیسی محوری یک بعدی است، بنابراین می توان از فولاد الکتریکی دانه گرا استفاده کرد. این فولاد عبور شار را آسان تر می کند و در نتیجه کارایی را بهبود می بخشد.
موتورهای شار شعاعی به طور سنتی از سیم پیچ های توزیع شده استفاده می کنند که نیمی از انتهای سیم پیچ ها کار نمی کنند. برآمدگی سیم پیچ منجر به وزن اضافی، هزینه، مقاومت الکتریکی و اتلاف حرارت بیشتر می شود و طراحان را مجبور می کند تا طراحی سیم پیچ را بهبود بخشند.
سیم پیچ به پایان می رسدموتورهای شار محوریبسیار کمتر هستند و در برخی از طرح ها از سیم پیچ های متمرکز یا قطعه قطعه استفاده می شود که کاملاً مؤثر هستند. برای ماشینهای شعاعی استاتور، گسیختگی مسیر شار مغناطیسی در استاتور میتواند تلفات بیشتری را به همراه داشته باشد، اما برای موتورهای شار محوری، این مشکلی ندارد. طراحی سیم پیچ سیم پیچ کلید تشخیص سطح تامین کنندگان است.
3. توسعه
موتورهای شار محوری با چالشهای جدی در طراحی و تولید مواجه هستند، علیرغم مزایای تکنولوژیکی، هزینههای آنها به مراتب بیشتر از موتورهای شعاعی است. مردم درک بسیار کاملی از موتورهای شعاعی دارند و روشهای ساخت و تجهیزات مکانیکی نیز به راحتی در دسترس هستند.
یکی از چالش های اصلی موتورهای شار محوری، حفظ شکاف هوای یکنواخت بین روتور و استاتور است، زیرا نیروی مغناطیسی بسیار بیشتر از موتورهای شعاعی است و حفظ شکاف هوای یکنواخت را دشوار می کند. موتور شار محوری روتور دوگانه همچنین دارای مشکلات اتلاف گرما است، زیرا سیم پیچ در اعماق استاتور و بین دو دیسک روتور قرار دارد و اتلاف گرما را بسیار دشوار می کند.
ساخت موتورهای شار محوری نیز به دلایل زیادی دشوار است. دستگاه روتور دوگانه با استفاده از دستگاه دو روتور با توپولوژی yokes (یعنی حذف یوغ آهن از استاتور اما حفظ دندانه های آهنی) برخی از این مشکلات را بدون گسترش قطر موتور و آهنربا برطرف می کند.
با این حال، برداشتن یوک چالشهای جدیدی را به همراه دارد، مانند نحوه ثابت کردن و قرار دادن تک تک دندانها بدون اتصال یوکی مکانیکی. خنک کردن نیز چالش بزرگتری است.
همچنین تولید روتور و حفظ شکاف هوا دشوار است، زیرا دیسک روتور روتور را جذب می کند. مزیت این است که دیسک های روتور مستقیماً از طریق یک حلقه شفت به هم متصل می شوند، بنابراین نیروها یکدیگر را خنثی می کنند. این بدان معنی است که یاتاقان داخلی این نیروها را تحمل نمی کند و تنها وظیفه آن نگه داشتن استاتور در موقعیت وسط بین دو دیسک روتور است.
موتورهای تک روتور دو استاتور با چالش های موتورهای دایره ای روبرو نیستند، اما طراحی استاتور بسیار پیچیده تر و دشوارتر برای دستیابی به اتوماسیون است و هزینه های مربوطه نیز بالا است. بر خلاف هر موتور شار شعاعی سنتی، فرآیندهای تولید موتور محوری و تجهیزات مکانیکی به تازگی ظهور کرده اند.
4. کاربرد وسایل نقلیه الکتریکی
قابلیت اطمینان در صنعت خودرو بسیار مهم است و اثبات قابلیت اطمینان و استحکام انواع مختلفموتورهای شار محوریمتقاعد کردن سازندگان مبنی بر اینکه این موتورها برای تولید انبوه مناسب هستند همیشه یک چالش بوده است. این امر تامین کنندگان موتور محوری را بر آن داشته است تا برنامه های اعتبارسنجی گسترده ای را به تنهایی انجام دهند و هر تامین کننده نشان دهد که قابلیت اطمینان موتور آنها با موتورهای شار شعاعی سنتی تفاوتی ندارد.
تنها جزء که می تواند در یکموتور شار محوریبلبرینگ است. طول شار مغناطیسی محوری نسبتاً کوتاه است و موقعیت یاتاقانها نزدیکتر است و معمولاً بهگونهای طراحی میشوند که کمی بیش از اندازه باشند. خوشبختانه، موتور شار محوری جرم روتور کوچکتری دارد و می تواند بارهای محور دینامیکی روتور کمتری را تحمل کند. بنابراین، نیروی واقعی اعمال شده به یاتاقان ها بسیار کمتر از نیروی موتور شار شعاعی است.

محور الکترونیکی یکی از اولین کاربردهای موتورهای محوری است. عرض نازک تر می تواند موتور و گیربکس را در محور محصور کند. در کاربردهای هیبریدی، طول محوری کوتاه تر موتور به نوبه خود طول کل سیستم انتقال را کوتاه می کند.
مرحله بعدی نصب موتور محوری روی چرخ است. به این ترتیب می توان نیرو را مستقیماً از موتور به چرخ ها منتقل کرد و بازده موتور را بهبود بخشید. با توجه به حذف گیربکس ها، دیفرانسیل ها و میل های محرک، پیچیدگی سیستم نیز کاهش یافته است.
با این حال، به نظر می رسد که تنظیمات استاندارد هنوز ظاهر نشده است. هر سازنده تجهیزات اصلی در حال تحقیق در مورد پیکربندی های خاص است، زیرا اندازه ها و شکل های مختلف موتورهای محوری می تواند طراحی خودروهای الکتریکی را تغییر دهد. در مقایسه با موتورهای شعاعی، موتورهای محوری چگالی توان بالاتری دارند، به این معنی که می توان از موتورهای محوری کوچکتر استفاده کرد. این گزینههای طراحی جدیدی را برای پلتفرمهای خودرو فراهم میکند، مانند قرار دادن بستههای باتری.
4.1 آرمیچر قطعه بندی شده
توپولوژی موتور YASA (Yokeless and Segmented Armature) نمونه ای از توپولوژی دو روتور تک استاتور است که پیچیدگی ساخت را کاهش می دهد و برای تولید انبوه خودکار مناسب است. این موتورها دارای چگالی توان تا 10 کیلووات بر کیلوگرم در سرعت های 2000 تا 9000 دور در دقیقه هستند.

با استفاده از یک کنترلر اختصاصی می تواند جریان 200 کیلوولت آمپر را برای موتور تامین کند. این کنترلر دارای حجم تقریبی 5 لیتر و وزن 5.8 کیلوگرم شامل مدیریت حرارتی با خنک کننده روغن دی الکتریک مناسب برای موتورهای شار محوری و همچنین موتورهای شار القایی و شعاعی می باشد.
این به سازندگان تجهیزات اصلی خودروهای الکتریکی و توسعه دهندگان ردیف اول اجازه می دهد تا به طور انعطاف پذیر موتور مناسب را بر اساس کاربرد و فضای موجود انتخاب کنند. اندازه و وزن کوچکتر باعث میشود خودرو سبکتر و باتریهای بیشتری داشته باشد و در نتیجه برد را افزایش میدهد.
5. کاربرد موتورسیکلت های برقی
برای موتورسیکلت های الکتریکی و ATV ها، برخی از شرکت ها موتورهای شار محوری AC را توسعه داده اند. طرح رایج مورد استفاده برای این نوع خودرو، طرحهای شار محوری مبتنی بر برس DC است، در حالی که محصول جدید یک طرح بدون برس AC و کاملا مهر و موم شده است.
سیمپیچهای هر دو موتور DC و AC ثابت میمانند، اما روتورهای دوگانه به جای آرمیچرهای دوار از آهنرباهای دائمی استفاده میکنند. مزیت این روش عدم نیاز به معکوس مکانیکی است.
طراحی محوری AC همچنین می تواند از کنترل کننده های موتور AC سه فاز استاندارد برای موتورهای شعاعی استفاده کند. این به کاهش هزینه ها کمک می کند، زیرا کنترل کننده جریان گشتاور را کنترل می کند، نه سرعت را. کنترل کننده به فرکانس 12 کیلوهرتز یا بالاتر نیاز دارد که فرکانس اصلی چنین دستگاه هایی است.
فرکانس بالاتر از اندوکتانس سیم پیچ کمتر 20 µH ناشی می شود. فرکانس می تواند جریان را کنترل کند تا موج جریان را به حداقل برساند و از یک سیگنال سینوسی تا حد ممکن اطمینان حاصل کند. از دیدگاه دینامیکی، این یک راه عالی برای دستیابی به کنترل نرمتر موتور با اجازه دادن به تغییرات سریع گشتاور است.
این طرح از سیم پیچ دولایه توزیع شده استفاده می کند، بنابراین شار مغناطیسی از روتور به روتور دیگری از طریق استاتور جریان می یابد، با یک مسیر بسیار کوتاه و بازده بالاتر.
نکته کلیدی این طراحی این است که می تواند با حداکثر ولتاژ 60 ولت کار کند و برای سیستم های ولتاژ بالاتر مناسب نیست. بنابراین می توان از آن برای موتورسیکلت های برقی و خودروهای چهار چرخ کلاس L7e مانند رنو توئیزی استفاده کرد.
حداکثر ولتاژ 60 ولت به موتور اجازه می دهد تا در سیستم های الکتریکی 48 ولت جریان اصلی ادغام شود و کار تعمیر و نگهداری را ساده می کند.
مشخصات موتور سیکلت چهار چرخ L7e در مقررات چارچوب اروپا 2002/24/EC تصریح می کند که وزن وسایل نقلیه مورد استفاده برای حمل و نقل کالا به استثنای وزن باتری ها از 600 کیلوگرم تجاوز نمی کند. این خودروها مجاز به حمل بیش از 200 کیلوگرم مسافر، حداکثر 1000 کیلوگرم بار و حداکثر 15 کیلووات قدرت موتور هستند. روش سیم پیچ توزیع شده می تواند گشتاور 75-100 نیوتن متر را با حداکثر توان خروجی 20-25 کیلو وات و توان پیوسته 15 کیلو وات ارائه دهد.
چالش شار محوری در این است که سیمپیچهای مسی چگونه گرما را دفع میکنند، که دشوار است زیرا گرما باید از روتور عبور کند. سیم پیچ توزیع شده کلید حل این مشکل است، زیرا دارای تعداد زیادی شکاف قطب است. به این ترتیب سطح بزرگتری بین مس و پوسته وجود دارد و گرما را می توان به بیرون منتقل کرد و توسط یک سیستم خنک کننده مایع استاندارد تخلیه کرد.
چندین قطب مغناطیسی کلیدی برای استفاده از اشکال موج سینوسی هستند که به کاهش هارمونیک ها کمک می کند. این هارمونیک ها به صورت گرم کردن آهنرباها و هسته ظاهر می شوند، در حالی که اجزای مسی نمی توانند گرما را از بین ببرند. هنگامی که گرما در آهنرباها و هسته های آهنی جمع می شود، بازده کاهش می یابد، به همین دلیل است که بهینه سازی شکل موج و مسیر گرما برای عملکرد موتور بسیار مهم است.
طراحی موتور برای کاهش هزینه ها و دستیابی به تولید انبوه خودکار بهینه شده است. یک حلقه مسکن اکسترود شده نیازی به پردازش مکانیکی پیچیده ندارد و می تواند هزینه های مواد را کاهش دهد. سیم پیچ را می توان مستقیماً پیچید و در طول فرآیند سیم پیچی از فرآیند اتصال برای حفظ شکل مونتاژ صحیح استفاده می شود.
نکته کلیدی این است که سیم پیچ از سیم استاندارد موجود در بازار ساخته شده است، در حالی که هسته آهنی با فولاد ترانسفورماتور قفسه استاندارد لایه بندی شده است، که به سادگی باید به شکل بریده شود. سایر طراحیهای موتور نیاز به استفاده از مواد مغناطیسی نرم در لایهگذاری هسته دارند، که ممکن است گرانتر باشد.
استفاده از سیم پیچ های توزیع شده به این معنی است که فولاد مغناطیسی نیازی به قطعه بندی ندارد. آنها می توانند شکل های ساده تری داشته باشند و ساخت آنها راحت تر باشد. کاهش اندازه فولاد مغناطیسی و اطمینان از سهولت ساخت آن تأثیر بسزایی در کاهش هزینه ها دارد.
طراحی این موتور شار محوری نیز می تواند با توجه به نیاز مشتری سفارشی شود. مشتریان نسخههای سفارشیسازی شدهای دارند که حول طراحی پایه توسعه یافتهاند. سپس در یک خط تولید آزمایشی برای تأیید تولید اولیه، که می تواند در کارخانه های دیگر تکرار شود، تولید می شود.
سفارشی سازی عمدتا به این دلیل است که عملکرد وسیله نقلیه نه تنها به طراحی موتور شار مغناطیسی محوری، بلکه به کیفیت ساختار خودرو، بسته باتری و BMS بستگی دارد.
زمان ارسال: سپتامبر 28-2023


