
ساختار و طراحی یک وسیله نقلیه الکتریکی خالص با خودروهای سنتی موتور احتراق داخلی متفاوت است. همچنین یک مهندسی سیستم پیچیده است. برای دستیابی به یک فرآیند کنترل بهینه، نیاز به ادغام فنآوری باتری نیرو، فناوری محرک موتور، فناوری خودرو و تئوری کنترل مدرن دارد. در طرح توسعه علم و فناوری خودروهای برقی، کشور همچنان به طرح تحقیق و توسعه «سه عمودی و سه افقی» پایبند است و تحقیقات بر روی فناوریهای کلیدی رایج «سه افقی» را با توجه به استراتژی تحول فناوری از آنها برجسته میکند. "درایو الکتریکی خالص"، یعنی تحقیق در مورد موتور محرک و سیستم کنترل آن، باتری نیرو و سیستم مدیریت آن، و سیستم کنترل پیشرانه. هر تولید کننده بزرگ استراتژی توسعه کسب و کار خود را با توجه به استراتژی توسعه ملی تدوین می کند.
نویسنده فناوریهای کلیدی را در فرآیند توسعه یک نیرومحرکه انرژی جدید طبقهبندی میکند، و مبنای نظری و مرجعی را برای طراحی، آزمایش و تولید پیشرانه ارائه میدهد. این طرح به سه فصل برای تجزیه و تحلیل فناوری های کلیدی محرک الکتریکی در پیشرانه خودروهای الکتریکی خالص تقسیم شده است. امروز ابتدا به معرفی اصل و طبقه بندی فناوری های محرک الکتریکی می پردازیم.
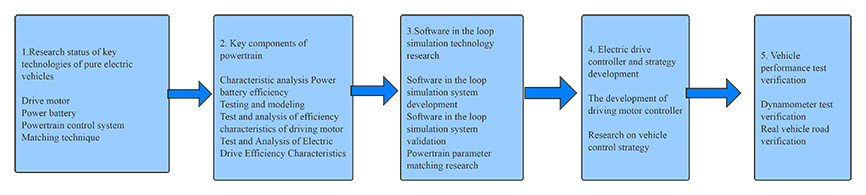
شکل 1 پیوندهای کلیدی در توسعه پیشرانه
در حال حاضر، فناوریهای کلیدی اصلی پیشرانه خودروهای الکتریکی خالص شامل چهار دسته زیر است:
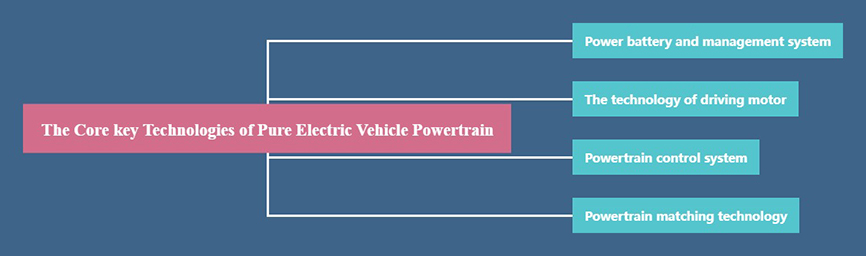
شکل 2 فن آوری های کلیدی اصلی پیشرانه
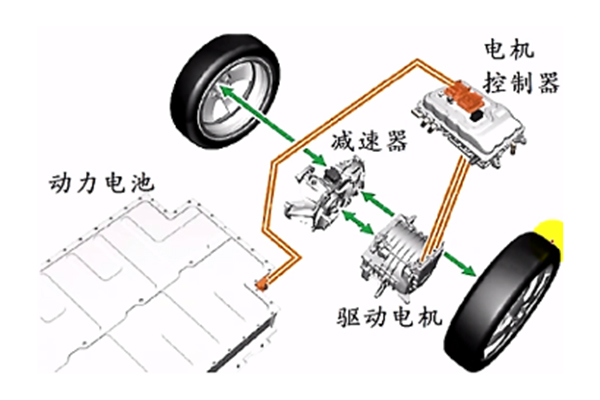
تعریف سیستم موتور رانندگی
با توجه به وضعیت باتری برق خودرو و نیاز به نیروی خودرو، انرژی الکتریکی خروجی توسط دستگاه تولید انرژی ذخیرهسازی انرژی روی برد را به انرژی مکانیکی تبدیل میکند و انرژی از طریق دستگاه فرستنده و قطعات به چرخهای محرک منتقل میشود. انرژی مکانیکی وسیله نقلیه به انرژی الکتریکی تبدیل می شود و هنگام ترمز خودرو به دستگاه ذخیره انرژی بازگردانده می شود. سیستم رانندگی الکتریکی شامل موتور، مکانیزم انتقال، کنترل کننده موتور و سایر اجزا است. طراحی پارامترهای فنی سیستم محرک انرژی الکتریکی عمدتاً شامل توان، گشتاور، سرعت، ولتاژ، نسبت انتقال کاهش، ظرفیت منبع تغذیه، توان خروجی، ولتاژ، جریان و غیره است.

1) کنترل کننده موتور
اینورتر نیز نامیده می شود و جریان مستقیم ورودی بسته باتری قدرت را به جریان متناوب تغییر می دهد. اجزای اصلی:
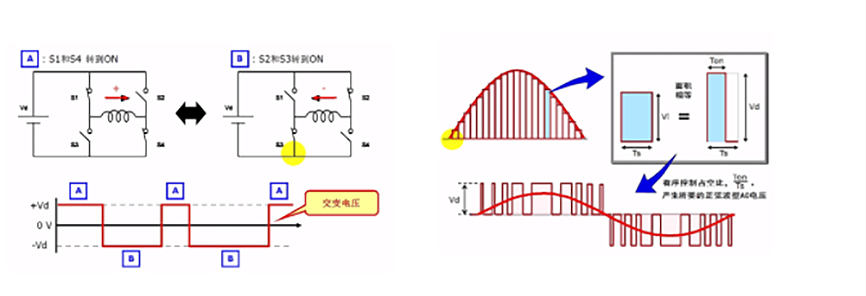
◎ IGBT: سوئیچ الکترونیکی قدرت، اصل: از طریق کنترلر، بازوی پل IGBT را کنترل کنید تا یک سوئیچ فرکانس و ترتیب خاصی را ببندید تا جریان متناوب سه فاز تولید شود. با کنترل کلید الکترونیکی قدرت برای بسته شدن، می توان ولتاژ متناوب را تبدیل کرد. سپس ولتاژ AC با کنترل چرخه وظیفه تولید می شود.
◎ ظرفیت فیلم: عملکرد فیلتر. سنسور جریان: تشخیص جریان سیم پیچ سه فاز.
2) مدار کنترل و رانندگی: برد کنترل کامپیوتر، رانندگی IGBT
نقش کنترل کننده موتور تبدیل DC به AC، دریافت هر سیگنال و خروجی قدرت و گشتاور مربوطه است. اجزای اصلی: کلید الکترونیکی قدرت، خازن فیلم، سنسور جریان، مدار درایو کنترل برای باز کردن کلیدهای مختلف، تشکیل جریان در جهات مختلف و تولید ولتاژ متناوب. بنابراین می توانیم جریان متناوب سینوسی را به مستطیل تقسیم کنیم. مساحت مستطیل ها به ولتاژی با همان ارتفاع تبدیل می شود. محور x با کنترل چرخه وظیفه کنترل طول را متوجه می شود و در نهایت تبدیل معادل مساحت را متوجه می شود. به این ترتیب، توان DC را می توان برای بستن بازوی پل IGBT در یک فرکانس و سوئیچ توالی مشخص از طریق کنترلر کنترل کرد تا برق سه فاز AC تولید شود.
در حال حاضر، اجزای کلیدی مدار درایو به واردات متکی هستند: خازن ها، لوله های سوئیچ IGBT/MOSFET، DSP، تراشه های الکترونیکی و مدارهای مجتمع که می توانند به طور مستقل تولید شوند اما ظرفیت ضعیفی دارند: مدارهای خاص، سنسورها، کانکتورها، که می توانند به طور مستقل تولید می شود: منابع تغذیه، دیودها، سلف ها، بردهای مدار چند لایه، سیم های عایق، رادیاتورها.
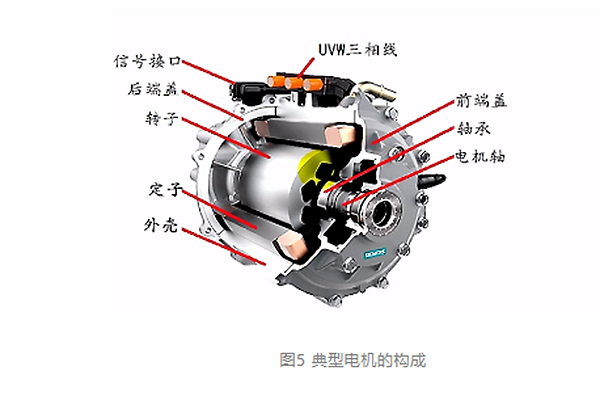
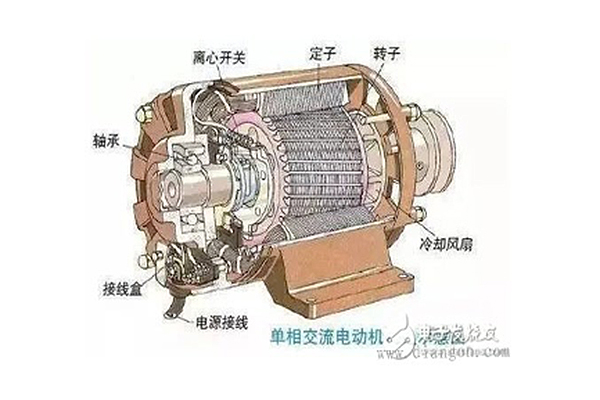
3) موتور: تبدیل جریان متناوب سه فاز به ماشین آلات
◎ ساختار: پوشش های انتهایی جلو و عقب، پوسته ها، شفت ها و یاتاقان ها
◎ مدار مغناطیسی: هسته استاتور، هسته روتور
◎ مدار: سیم پیچ استاتور، هادی روتور
4) دستگاه انتقال
گیربکس یا کاهنده سرعت گشتاور خروجی موتور را به سرعت و گشتاور مورد نیاز کل وسیله نقلیه تبدیل می کند.
نوع موتور محرکه
موتورهای محرک به چهار دسته زیر تقسیم می شوند. در حال حاضر موتورهای القایی AC و موتورهای سنکرون مغناطیس دائم رایج ترین انواع وسایل نقلیه الکتریکی انرژی جدید هستند. بنابراین ما بر روی فناوری موتور القایی AC و موتور سنکرون آهنربای دائم تمرکز می کنیم.
| موتور DC | موتور القایی AC | موتور سنکرون آهنربای دائمی | موتور رلوکتانس سوئیچ شده | |
| مزیت | هزینه کمتر، نیازهای کم سیستم کنترل | هزینه کم، پوشش قدرت گسترده، فناوری کنترل توسعه یافته، قابلیت اطمینان بالا | چگالی توان بالا، راندمان بالا، اندازه کوچک | ساختار ساده، نیازهای کم سیستم کنترل |
| نقطه ضعف | نیازهای تعمیر و نگهداری بالا، سرعت کم، گشتاور کم، طول عمر کوتاه | منطقه کارآمد کوچک چگالی توان کم | هزینه بالا سازگاری محیطی ضعیف | نوسانات گشتاور زیاد صدای کار زیاد |
| برنامه | وسیله نقلیه الکتریکی کوچک یا مینی کم سرعت | خودروهای تجاری و سواری برقی | خودروهای تجاری و سواری برقی | خودرو با قدرت مخلوط |
 1) موتور ناهمزمان القایی AC
1) موتور ناهمزمان القایی AC
اصل کار یک موتور ناهمزمان القایی AC این است که سیم پیچ از شکاف استاتور و روتور عبور می کند: توسط ورق های فولادی نازک با رسانایی مغناطیسی بالا انباشته شده است. برق سه فاز از سیم پیچ عبور می کند. طبق قانون القای الکترومغناطیسی فارادی، یک میدان مغناطیسی دوار ایجاد می شود که دلیل چرخش روتور است. سه سیم پیچ استاتور در فاصله 120 درجه به هم متصل شده اند و هادی حامل جریان میدان های مغناطیسی در اطراف آنها ایجاد می کند. هنگامی که منبع تغذیه سه فاز به این آرایش ویژه اعمال می شود، میدان های مغناطیسی با تغییر جریان متناوب در یک زمان خاص در جهات مختلف تغییر می کنند و میدان مغناطیسی با شدت چرخش یکنواخت ایجاد می کنند. سرعت چرخش میدان مغناطیسی را سرعت سنکرون می نامند. فرض کنید طبق قانون فارادی یک هادی بسته در داخل قرار داده شده است، چون میدان مغناطیسی متغیر است، حلقه نیروی الکتروموتور را حس می کند که جریانی را در حلقه ایجاد می کند. این وضعیت درست مانند حلقه حامل جریان در میدان مغناطیسی است که نیروی الکترومغناطیسی روی حلقه ایجاد می کند و هوان جیانگ شروع به چرخش می کند. با استفاده از چیزی شبیه به قفس سنجاب، یک جریان متناوب سه فاز یک میدان مغناطیسی دوار از طریق استاتور ایجاد می کند و جریان در نوار قفس سنجاب که توسط حلقه انتهایی کوتاه شده است، القا می شود، بنابراین روتور شروع به چرخش می کند، که چرا موتور را موتور القایی می نامند. با کمک القای الکترومغناطیسی به جای اتصال مستقیم به روتور برای القای الکتریسیته، تکه های هسته آهن عایق در روتور پر می شوند، به طوری که آهن با اندازه کوچک حداقل تلفات جریان گردابی را تضمین می کند.
2) موتور سنکرون AC
روتور موتور سنکرون با موتور آسنکرون متفاوت است. آهنربای دائمی بر روی روتور نصب می شود که می توان آن را به نوع نصب شده روی سطح و نوع تعبیه شده تقسیم کرد. روتور از ورق فولادی سیلیکونی ساخته شده است و آهنربای دائمی آن تعبیه شده است. همچنین استاتور با یک جریان متناوب با اختلاف فاز 120 متصل است که اندازه و فاز جریان متناوب موج سینوسی را کنترل می کند، به طوری که میدان مغناطیسی تولید شده توسط استاتور مخالف میدان مغناطیسی تولید شده توسط روتور و مغناطیسی باشد. میدان در حال چرخش است به این ترتیب استاتور توسط یک آهنربا جذب می شود و با روتور می چرخد. چرخه پس از چرخه توسط جذب استاتور و روتور ایجاد می شود.
نتیجهگیری: موتور محرکه وسایل نقلیه الکتریکی اساساً به جریان اصلی تبدیل شده است، اما منفرد نیست، بلکه متنوع است. هر سیستم محرک موتور دارای شاخص جامع خود است. هر سیستم در محرک خودروی الکتریکی موجود اعمال می شود. بیشتر آنها موتورهای ناهمزمان و موتورهای سنکرون مغناطیس دائم هستند، در حالی که برخی سعی می کنند موتورهای رلوکتانس را تغییر دهند. شایان ذکر است که درایو موتور فناوری الکترونیک قدرت، فناوری میکروالکترونیک، فناوری دیجیتال، فناوری کنترل خودکار، علم مواد و سایر رشتهها را ادغام میکند تا کاربرد جامع و چشمانداز توسعه رشتههای مختلف را منعکس کند. این یک رقیب قوی در موتورهای وسایل نقلیه الکتریکی است. به منظور اشغال جایگاهی در وسایل نقلیه الکتریکی آینده، انواع موتورها نه تنها به بهینه سازی ساختار موتور نیاز دارند، بلکه به طور مداوم جنبه های هوشمند و دیجیتالی سیستم کنترل را کشف می کنند.
زمان ارسال: ژانویه 30-2023


